
概要
一般に「駆動」として知られるブリッジクレーンは、産業および鉱山企業で広く使用されている一種の昇降機械であり、その動作メカニズムは、基本的に3つの独立した駆動システム、自動車駆動システム、フック駆動システム、K-DRIVEインバータで構成されています。以上の 3 つの駆動システムは改革に成功しましたが、以下では歩行システムの前後の駆動システムの変革プロセスを中心に説明します。

スキーム 利点
- フィールド指向の電流開ループベクトル制御、完全に分離されたモーター変数、大きな低周波トルク、高速応答など。
- KD600は、PGフリーオープンループベクトル制御モードとベクトル化V/Fモードを採用し、1速ギアのパワーレベル構成を増幅します。
- 周波数範囲: 0.5-600Hz セグメント設定、無段階連続調整;
- 動作電圧範囲: 380V ± 20%、バス電圧は瞬時に 360VDC に低下し、トラブルなく動作します。
- 過負荷容量: 定格電流の 150%、1 分間許容。 200% 定格電流、1 秒許容。
- トルク特性:始動トルク、定格トルクの2倍以上。低周波トルク、1Hz で定格トルクの 1.6 倍以上。制動トルクが定格トルクを超えています。
動作特性
- クレーン昇降機構の起動トルクは大きく、通常定格トルクの150%を超えます。過負荷およびその他の要因を考慮した場合、始動および加速プロセス中に定格トルクの少なくとも 200% を提供する必要があります。
- 昇降機構が下向きに動作するとき、モーターは回生発電状態になり、エネルギー消費制動または系統への回生フィードバックを行う必要があります。
- 吊り上げ機構の荷重は、吊り上げられた物体が地面から離れたり地面に触れたりすると劇的に変化しますが、周波数変換器は衝撃荷重をスムーズに制御できなければなりません。
- クレーンの前後走行機構の走行速度は機械設計上高くないため、コンバータを使用することで適切な過速度を実現し、作業効率を向上させることができます。
簡単な配線図
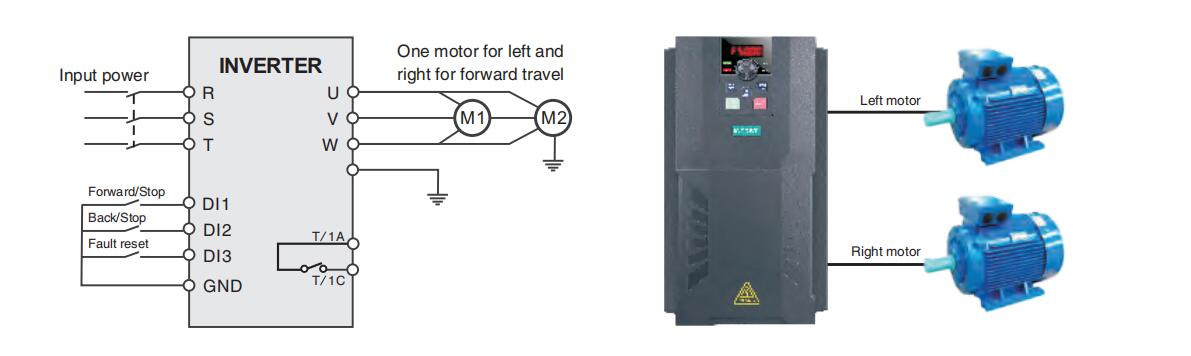
パラメータ設定NGと説明(左右モーター走行パラメータ)
| パラメータ | 説明する | パラメータ設定 | 説明する |
| P0-00=0 | VF制御 | P5-00=1 | フォワード |
| P0-04=1 | 外部端子起動停止 | P5-01=2 | 後で実行する |
| P0-06=1 | デジタル周波数設定 | P6-00=2 | リレー 1 障害出力 |
| P0-14=60.00 | 最大周波数 | P4-01=1.6KW | 接続されたモーター電源 |
| P0-16=60.00 | 上限周波数 | P4-02=380V | モーター定格電圧 |
| P0-11=60.00 | デジタル設定周波数 | P4-04=3.3A | モーター定格電流 |
| P0-23=3.0秒 | 加速時間 | P4-05=50Hz | モーターの定格周波数 |
| P0-24=2.0秒 | 減速時間 | P4-06=960R/分 | モーターの定格回転数 |
| 注: 1 つの周波数コンバータを 2 つのモーターで使用する場合、各モーターを保護するために、各モーターのフロントエンドに適合するサーマル リレーを取り付けることを強くお勧めします。 | |||
運用効果分析
KD600 シリーズ周波数変換器は走行システム上で周波数変換変換を実行しており、その変換効果は比較的理想的であり、主に次のとおりです。
- 起動時のソフトスタートとソフトストップを実現し、電力網への影響を軽減します。
- 周波数変換器を使用すると、本来のシフトコンタクタと速度調整抵抗器が省略され、メンテナンスコストが節約されるだけでなく、メンテナンスのためのダウンタイムも短縮され、出力が増加します。
- メインフックが 5Hz ~ 30Hz で動作する場合、省エネ効果は非常に明らかです。
- 周波数変換器は前後の走行を制御するために使用され、左右の走行機構シリーズは超周波数動作を実現できます。安全確保を前提に作業効率が大幅に向上し、ACコンタクタの頻繁な交換による走行装置のメンテナンス負担も軽減されます。
閉会の挨拶
周波数変換器を使用して前後歩行と左右歩行機構シリーズを制御することで、オーバークロック作業を実現し、安全確保を前提とした作業効率を大幅に向上させるとともに、駆動機器のメンテナンス負荷も軽減します。 AC コンタクタを頻繁に交換する必要があります。
申込サイト

投稿日時: 2023 年 11 月 17 日